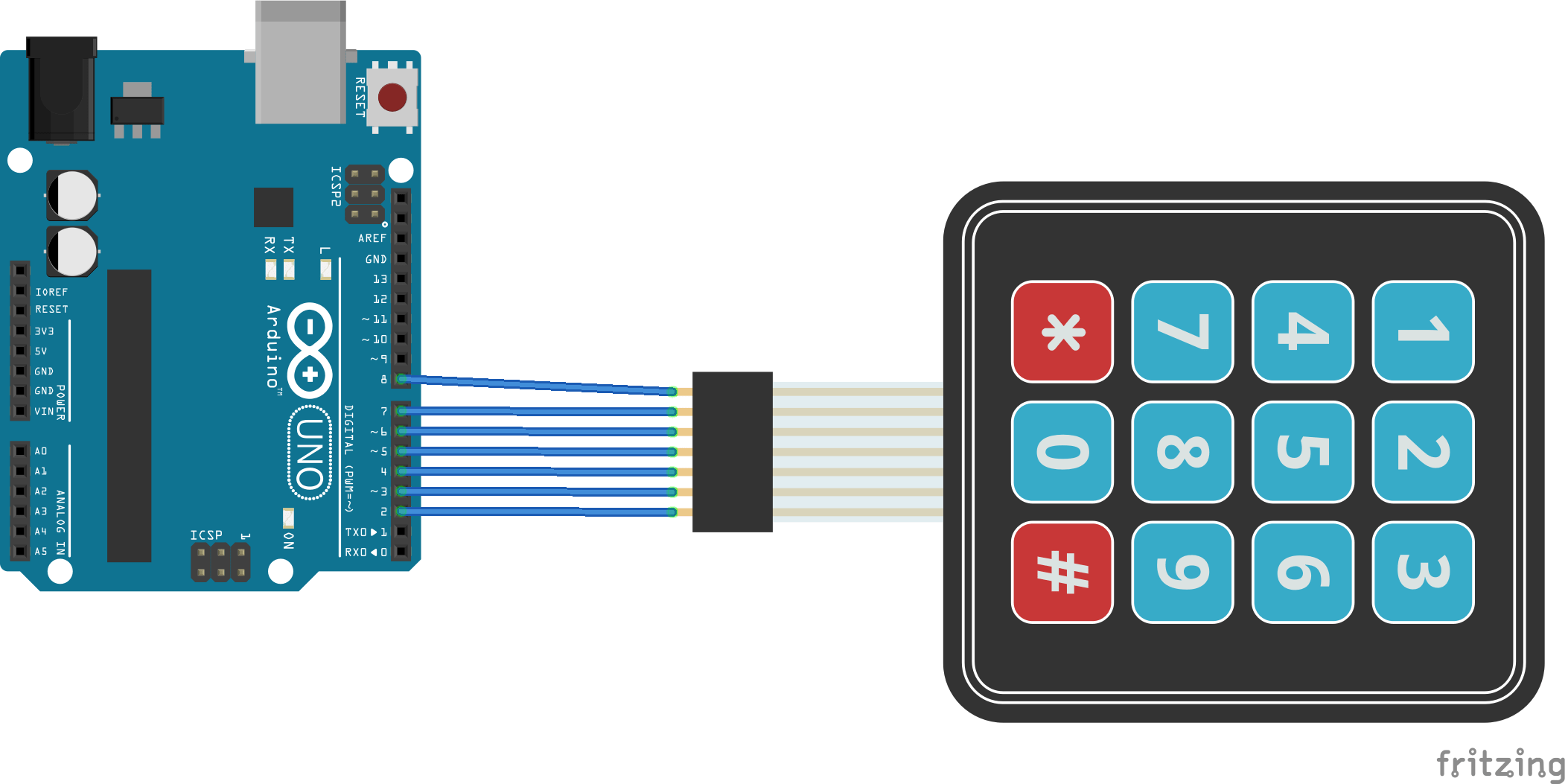
Alright, so I'm finally on the verge of getting my project finished. But for whatever reason, my code or my nodes are working. I have a keypad (https://www.adafruit.com/product/419) and I am wanting to tell my Whisper Node to send motor speed and direction to this motor controller (http://www.robotshop.com/en/30a-5-30v-s ... fgodL1QGTA). I already have the code written but it isn't working. Some help troubleshooting would be much appreciated! I hate to ask but I'm about to pull my hair out over it.. 

Transmitter Code:
And the reciever code is here:
Transmitter Code:
Code: Select all
#include <T2WhisperNode.h>
#include <Keypad.h>
#include <RH_RF69.h>
#define joystick_x A0
#define joystick_sel A2
RH_RF69 rf69;
const byte ROWS = 4;
const byte COLS = 3;
char keys[ROWS][COLS] = {
{'1', '2', '3'},
{'4', '5', '6'},
{'7', '8', '9'},
{'#', '0', '*'}
};
byte rowPins[ROWS] = { 8, 7, 6, 5};
byte colPins[COLS] = { 4, 3, 2 };
Keypad myKeypad = Keypad( makeKeymap(keys), rowPins, colPins, ROWS, COLS );
int dir = 0;
int speedM = 0;
String input = "";
char previousKey;
uint8_t data = 0;
unsigned long lastMillis = 0;
int count = 0;
boolean record = false;
void setup() {
Serial.begin(9600);
Serial.println("Code uploaded.");
if (!rf69.init())
Serial.println("init failed");
if (!rf69.setFrequency(915.0))
Serial.println("setFrequency failed");
// The encryption key has to be the same as the one in the server
uint8_t key[] = { 0x01, 0x02, 0x03, 0x04, 0x05, 0x06, 0x07, 0x08,
0x01, 0x02, 0x03, 0x04, 0x05, 0x06, 0x07, 0x08
};
rf69.setEncryptionKey(key);
pinMode(joystick_sel , INPUT_PULLUP);
pinMode(4, INPUT_PULLUP);
pinMode(5, INPUT_PULLUP);
}
void loop(){
char key1 = myKeypad.getKey();
if (key1 != NO_KEY || key2 != NO_KEY){
Serial.print("You pressed: ");
Serial.print(key1 != NO_KEY ? key1 : "nothing on keypad");
Serial.print(" and ");
Serial.print(key2 != NO_KEY ? key2 : "nothing on keypad2");
Serial.println(".");
}
}
void loop() {
char keypressed = myKeypad.getKey();
Serial.println(keypressed);
if (keypressed != NO_KEY && keypressed != previousKey)
{
input = input + keypressed;
previousKey = keypressed;
lastMillis = millis();
}
if (input.equals("*#") && millis() - lastMillis >= 3000 && keypressed == '#')
{
record = true;
Serial.println("Recording Mode");
uint8_t data[] = "0";
rf69.send(data, sizeof(data));
rf69.waitPacketSent();
input = "";
}
if (keypressed == '0')
{
count = 0;
record = false ;
}
//--------------------------------Record Mode--------------------------------
if (record) // rotate and store
{
keypressed = myKeypad.getKey();
uint8_t data[1] ;
((String)keypressed).toCharArray(data,sizeof(data));
rf69.send(data, sizeof(data));
rf69.waitPacketSent();
/*int dir_raw = analogRead(joystick_x);
if (dir_raw > 512)
{
dir = 1; //CW
}
if (dir_raw < 512)
{
dir = 2; //CCW
}
if (dir_raw == 512)
{
dir = 0; //Neutral
}
*/
if (digitalRead(4) == LOW) { //built in button for temportary testing
dir = 1; //CW
}
if (digitalRead(5) == LOW) { //built in button for temportary testing
dir = 2; //CCW
}
/** if (digitalRead(joystick_sel) == LOW)
{
speedM = (speedM + 1) % 3 ;
} **/
sendPath();
}
//--------------------------------Play Mode--------------------------------
for (int i = 1 ; i <= 9 ; i++) {
if (keypressed == (i)) {
uint8_t data[1] ;
((String)keypressed).toCharArray(data,sizeof(data));
rf69.send(data, sizeof(data));
rf69.waitPacketSent();
}
}
delay(500);
}
void sendPath () {
count = 1;
if (dir == 1) {
uint8_t data[] = "1";
rf69.send(data, sizeof(data)); //CW
rf69.waitPacketSent();
}
if (dir == 2) {
uint8_t data[] = "2";
rf69.send(data, sizeof(data)); //CCW
rf69.waitPacketSent();
}
if ( dir == 0) {
uint8_t data[] = "0";
rf69.send(data, sizeof(data));
rf69.waitPacketSent();
}
if (speedM == 1) {
uint8_t data[] = "3";
rf69.send(data, sizeof(data)); //Slow
rf69.waitPacketSent();
}
if (speedM == 0) {
uint8_t data[] = "4";
rf69.send(data, sizeof(data)); //Fast
rf69.waitPacketSent();
}
}
Code: Select all
#include <SD.h>
#include <SPI.h>
#include <RH_RF69.h>
#define direct 4
#define sp 5
RH_RF69 rf69;
int Speed = 125;
int slow_Speed = 125;
int high_Speed = 255 ; //Adjust high speed and low speed values from 0-255 according to the requirements
int direction ;
int index , fileNum ;
boolean record = false;
File p[9] ;
const char* Path[9] = {"p[1].txt", "p[2].txt", "p[3].txt", "p[4].txt", "p[5].txt", "p[6].txt", "p[7].txt", "p[8].txt", "p[9].txt"};
void setup() {
Serial.begin(9600);
if (!rf69.init())
Serial.println("init failed");
if (!rf69.setFrequency(915.0))
Serial.println("setFrequency failed");
uint8_t key[] = { 0x01, 0x02, 0x03, 0x04, 0x05, 0x06, 0x07, 0x08,
0x01, 0x02, 0x03, 0x04, 0x05, 0x06, 0x07, 0x08
};
rf69.setEncryptionKey(key);
#if 0
// For compat with RFM69 Struct_send
rf69.setModemConfig(RH_RF69::GFSK_Rb250Fd250);
rf69.setPreambleLength(3);
uint8_t syncwords[] = { 0x2d, 0x64 };
rf69.setSyncWords(syncwords, sizeof(syncwords));
rf69.setEncryptionKey((uint8_t*)"thisIsEncryptKey");
#endif
if (!SD.begin(10)) {
Serial.println("SD card initialization failed!");
return;
}
pinMode(direct , OUTPUT);
pinMode(sp , OUTPUT);
}
void loop() {
if (rf69.available())
{
uint8_t buf[RH_RF69_MAX_MESSAGE_LEN];
uint8_t len = sizeof(buf);
if (rf69.recv(buf, &len))
{
String str = (char*)buf;
if (str == "Record") {
Serial.print("Writing to file ");
record = true;
}
if (str == "Finish") {
Serial.print("Path recording complete");
record = false;
}
for (int i = 1 ; i < 10 ; i++) {
if (str == (String)i && record == true) {
Serial.println(str);
fileNum = (i - 1);
}
else if (str == (String)i && record == false) {
p[i - 1] = SD.open(Path[i - 1]);
if (p[i - 1]) {
Serial.println("File Open");
// read from the file until there's nothing else in it:
while (p[i - 1].available()) {
int d = p[i - 1].read();
Serial.write(p[i - 1].read());
if (d == 1) { //CW
digitalWrite(direct , LOW);
digitalWrite(sp , Speed);
}
if (d == 2) { //CCW
digitalWrite(direct , HIGH);
digitalWrite(sp , Speed);
}
if (d == 3) { //Slow speed
Speed = slow_Speed ;
digitalWrite(sp , Speed);
}
if (d == 4) { //CCW
Speed = high_Speed ;
digitalWrite(sp , Speed);
}
}
// close the file:
p[i - 1].close();
} else {
// if the file didn't open, print an error:
Serial.println("Error opening file");
}
}
}
if (record) {
if (p[fileNum]) {
Serial.println(str);
p[record].println(str);
if (str == "1") { //CW
digitalWrite(direct , LOW);
digitalWrite(sp , Speed);
}
if (str == "2") { //CCW
digitalWrite(direct , HIGH);
digitalWrite(sp , Speed);
}
if (str == "3") { //Slow speed
Speed = slow_Speed ;
digitalWrite(sp , Speed);
}
if (str == "4") { //CCW
Speed = high_Speed ;
digitalWrite(sp , Speed);
}
}
} else {
// if the file didn't open, print an error:
Serial.println("error opening file");
}
}
else
{
Serial.println("recv failed");
}
}
}